A fines de la década de 1950, antes de que la NASA tuviera la intención de ir a la Luna, o necesitar una computadora para llegar allí, el Laboratorio de Instrumentación del MIT había diseñado y construido una pequeña sonda prototipo que esperaban algún día volar a Marte (lea el fondo en parte 1 de esta historia aquí). Esta pequeña sonda utilizó una computadora pequeña y rudimentaria de uso general para la navegación, basada en los sistemas de inercia para misiles balísticos, submarinos y aviones que el Laboratorio había diseñado y construido para el ejército desde la Segunda Guerra Mundial.
La gente del Laboratorio de Instrumentación pensó que su concepto Mars Probe, y en particular el sistema de navegación, sería de interés para aquellos involucrados en los incipientes esfuerzos de exploración planetaria, como la Fuerza Aérea de los EE. UU. Y el Laboratorio de Propulsión a Chorro. Pero cuando el MIT Lab se acercó a ellos, ninguna de las entidades estaba interesada. La Fuerza Aérea estaba saliendo del negocio espacial, y JPL tenía planes para operar su propia nave espacial planetaria, haciendo navegación desde el gran plato de comunicación Goldstone en el desierto de Mojave. El plato de radar de 26 metros había sido construido para rastrear las primeras sondas robóticas de Pioneer.
Tanto la Fuerza Aérea como el JPL sugirieron que el Laboratorio hablara con la gente de la recién formada organización de la NASA.
Los miembros del laboratorio visitaron a Hugh Dryden, Administrador Adjunto de la NASA en Washington D.C., y Robert Chilton, quien dirigía la Rama de Dinámica de Vuelo de la NASA en el Centro de Investigación Langley. Ambos hombres pensaron que el Laboratorio había hecho un trabajo muy bueno en el diseño, especialmente en la computadora de guía. La NASA decidió darle al laboratorio $ 50,000 para continuar sus estudios sobre el concepto.

Más tarde, se estableció una reunión entre el líder del Laboratorio, el Dr. Charles Stark Draper y otros líderes de la NASA para discutir los diversos planes de largo alcance que la NASA tenía en mente, y cómo los diseños del Laboratorio podrían encajar en una nave espacial pilotada por humanos. Después de varias reuniones, se determinó que el sistema debería consistir en una computadora digital de uso general con controles y pantallas para los astronautas, un sextante espacial, una unidad de guía inercial con giroscopios y acelerómetros, y toda la electrónica de soporte. En todas estas discusiones, todos estuvieron de acuerdo en que el astronauta debería desempeñar un papel en la operación de la nave espacial y no solo acompañarlo. Y a todas las personas de la NASA les gustó especialmente la capacidad de navegación autónoma, ya que se temía que la Unión Soviética pudiera interferir con las comunicaciones entre una nave espacial estadounidense y el suelo, poniendo en peligro la misión y la vida de los astronautas.
Pero entonces, nació el Proyecto Apolo. El presidente John F. Kennedy retó a la NASA en abril de 1961 a aterrizar en la Luna y regresar a salvo a la Tierra, todo antes del final de la década. Solo once semanas después, en agosto de 1961, se firmó el primer contrato principal para Apollo con el Laboratorio de Instrumentación del MIT para construir el sistema de guía y navegación.
"Teníamos un contrato", dijo Dick Battin, un ingeniero de TheLab que había sido parte del equipo de diseño de Mars Probe, "pero ... no teníamos idea de cómo íbamos a hacer este trabajo, aparte de intentar modelarlo después de nuestro Mars Investigacion."
Parte del conocimiento del Apollo Guidance Computer (AGC) es que algunas de las especificaciones enumeradas en la propuesta de 11 páginas del Laboratorio fueron básicamente sacadas de la nada por Doc Draper. Por falta de mejores números, y sabiendo que tendría que caber dentro de una nave espacial, dijo que pesaría 100 libras, tendría un tamaño de 1 pie cúbico y usaría menos de 100 vatios de potencia.
Pero en ese momento, se conocían muy pocas especificaciones sobre cualquiera de los otros componentes o naves espaciales del Apolo, ya que no se habían otorgado otros contratos, y la NASA aún no había decidido su método (ascenso directo, Encuentro en órbita terrestre o Encuentro en órbita lunar) y Los tipos de naves espaciales para llegar a la Luna.
"Dijimos: 'No sabemos cuál es el trabajo, pero este es el equipo que tenemos, y trabajaremos en ello, intentaremos expandirlo, haremos todo lo que podamos'", dijo Battin. . "Pero era la única computadora que alguien tiene en el país que podría hacer este trabajo ... cualquiera que sea este trabajo".

Battin recordó cómo, al principio, la opción de volar a la Luna sería la reunión de la órbita terrestre, donde las diversas partes de la nave espacial se lanzarían desde la Tierra y se combinarían en la órbita terrestre y volarían a la Luna y aterrizarían allí en su conjunto. Pero finalmente, el concepto de encuentro en la órbita lunar ganó, donde el módulo de aterrizaje se separaría del Módulo de Comando y aterrizaría en la Luna.
"Entonces, cuando eso ocurrió, entonces la pregunta era ... ¿necesitamos un sistema de guía completamente nuevo y diferente para el Módulo Lunar del que tenemos para el Módulo de Comando?" Battin dijo. “¿Qué vamos a hacer al respecto? Convencimos a la NASA de usar el mismo sistema [informático] en ambas naves espaciales. Tienen diferentes misiones, pero podríamos poner un sistema duplicado en el módulo lunar. Entonces eso es lo que hicimos ".
El trabajo conceptual inicial en el Apollo Guidance Computer (AGC) avanzó rápidamente, con Battin y sus cohortes Milt Trageser, Hal Laning, David Hoag y Eldon Hall trabajando en la configuración general de orientación, navegación y control.
La orientación significaba dirigir el movimiento de una nave, mientras que la navegación se refería a determinar la posición actual con la mayor precisión posible, en relación con un destino futuro. El control se refería a dirigir los movimientos del vehículo y en el espacio las direcciones relacionadas con su actitud (guiñada, cabeceo y balanceo) o velocidad (velocidad y dirección). La experiencia del MIT se centró en la orientación y la navegación, mientras que los ingenieros de la NASA, especialmente aquellos que tenían experiencia trabajando en el Proyecto Mercurio, enfatizaron la orientación y el control. Entonces, las dos entidades trabajaron juntas para crear las maniobras que se requerirían en base a los datos de los giroscopios y acelerómetros y cómo hacer que las maniobras sean parte de la computadora y el software.
Para el Laboratorio de Instrumentación del MIT, una gran preocupación sobre la Computadora de Orientación Apollo era la confiabilidad. La computadora sería el cerebro de la nave espacial, pero ¿y si fallara? Dado que la redundancia era una solución conocida para el problema básico de confiabilidad, la gente de The Lab sugirió incluir dos computadoras a bordo, una como respaldo. Pero North American Aviation, la empresa que construye los módulos de servicio y comando Apollo, tenía sus propios problemas para cumplir con los requisitos de peso. Norteamérica rápidamente rechazó los requisitos de tamaño y espacio de dos computadoras, y la NASA estuvo de acuerdo.
Otra idea para una mayor confiabilidad incluía tener tableros de circuitos de repuesto y otros módulos a bordo de la nave espacial para que los astronautas pudieran hacer "mantenimiento en vuelo", reemplazando las piezas defectuosas durante el espacio. Pero la idea de un astronauta abriendo un compartimento o una tabla del piso, buscando un defecto módulo, e insertar una placa de circuito de repuesto mientras se acercaba a la Luna parecía absurdo, a pesar de que esta opción se consideró fuertemente durante bastante tiempo.
"Dijimos," solo vamos a hacer que esta computadora sea confiable "", recordó Battin. "Hoy, sería expulsado del programa si dijera que lo va a construir para que no falle. Pero eso es lo que hicimos ".
Para el otoño de 1964, The Lab comenzó a diseñar su versión actualizada del AGC, principalmente para aprovechar la tecnología mejorada. Uno de los aspectos más desafiantes de la misión Apollo fue la cantidad de computación en tiempo real requerida para navegar la nave espacial hacia la Luna y de regreso. Cuando los ingenieros del Laboratorio comenzaron su trabajo en el proyecto, las computadoras aún confiaban en la tecnología analógica. Las computadoras análogas no eran lo suficientemente rápidas o confiables para una misión a la Luna.
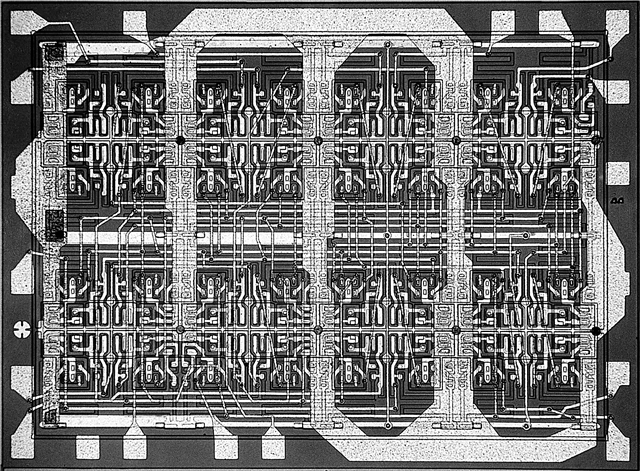
Los circuitos integrados, que acababan de inventarse en 1959, ahora eran más capaces, confiables y más pequeños; podrían reemplazar los diseños anteriores utilizando circuitos de transistores centrales, ocupando aproximadamente un 40 por ciento menos de espacio. Tan rápido como la tecnología había avanzado desde que el MIT ganó el contrato de AGC en 1961, se sentían seguros de que el tiempo de espera hasta el primer vuelo de Apollo permitiría mayores avances en confiabilidad y, con suerte, reducciones en los costos. Con esa decisión, el AGC se convirtió en una de las primeras computadoras en usar circuitos integrados, y pronto, más de dos tercios de la producción total de microcircuitos en los EE. UU. Se estaba utilizando para construir prototipos de computadoras Apollo.
Título de la imagen principal: Un circuito integrado temprano, conocido como el circuito integrado Fairchild 4500a. Imagen cortesía de Draper.
Aunque muchos elementos de diseño para el hardware de la computadora comenzaron a encajar, a mediados de la década de 1960 se hizo evidente un problema persistente: la memoria. El diseño original, basado en la sonda Mars, tenía solo 4 kilobytes de palabras de memoria fija y 256 palabras de borrable. A medida que la NASA agregó más aspectos al programa Apollo, los requisitos de memoria siguieron aumentando, a 10 K, luego a 12, 16, 24 y finalmente a 36 Kilobytes de memoria fija y 2 K ofertables.
El sistema que diseñó el laboratorio se llamaba memoria de cuerda central, con software creado cuidadosamente con alambre de aleación de níquel tejido a través de las diminutas "rosquillas" magnéticas para crear la memoria no borrable. En el lenguaje de los unos y los ceros de la computadora, si era uno, corría por la rosquilla; Si era un cero, el cable corría a su alrededor. Para un componente de memoria, se necesitaron paquetes de media milla de alambre tejido a través de 512 núcleos magnéticos. Un módulo podría almacenar más de 65,000 piezas de información.
Battin llamó al proceso para construir la memoria core-rope el método LOL.

"Little Old Ladies", dijo. "Las mujeres en la fábrica de Raytheon literalmente tejerían el software en esta memoria de núcleo".
Si bien las mujeres realizaron principalmente el tejido, no eran necesariamente viejas. Raytheon empleó a muchos ex trabajadores textiles, expertos en tejer, que necesitaban seguir instrucciones detalladas para tejer los alambres.
Cuando se construyeron los recuerdos de la cuerda central, el proceso fue bastante laborioso: dos mujeres se sentaban una frente a la otra y tejían a mano una corriente de cables a través de pequeños núcleos magnéticos, empujando una sonda con el cable conectado desde un lado al otro. Para 1965, se implementó un método más mecánico para tejer los alambres, nuevamente, basado en máquinas textiles usadas en la industria de tejido de Nueva Inglaterra. Pero aún así, el proceso fue extremadamente lento, y un programa podría tomar varias semanas o incluso meses para tejer, con más tiempo necesario para probarlo. Cualquier error en el tejido significaba que tendría que rehacerse. La computadora del Módulo de Comando contenía seis conjuntos de módulos de núcleo-cuerda, mientras que la computadora del Módulo Lunar contenía siete.
En total, había aproximadamente 30,000 partes en la computadora. Cada componente se someterá a una prueba eléctrica y una prueba de esfuerzo. Cualquier falla requirió el rechazo del componente.
"Aunque la memoria era confiable", dijo Battin, "lo que a la NASA no le gustó fue el hecho de que desde el principio era necesario decidir cuál iba a ser el programa de computadora". Nos preguntaron, "¿Qué pasaría si tuviéramos un cambio de último minuto?" Y dijimos que no podemos tener cambios de último minuto, y en cualquier momento que desee cambiar la memoria, significa un deslizamiento de seis semanas, mínimo. Cuando la NASA dijo que era intolerable, les dijimos: "Bueno, esa es la forma en que esta computadora es, y no hay ninguna otra computadora como esta que pueda usar".
Mientras que el diseño y la construcción de todo el hardware presentaban desafíos, a medida que el trabajo progresaba en el AGC hasta 1965 y hasta 1966, se destacaba la magnitud y la complejidad de otro aspecto: la programación del software. Se convirtió en el principal problema definitorio de la computadora, al cumplir con los plazos y las especificaciones.
Toda la programación se realizó básicamente en los unos y en el nivel cero, programación en lenguaje ensamblador. Al diseñar el software para realizar tareas complicadas, los ingenieros de software necesitaban encontrar formas ingeniosas de ajustar el código dentro de las restricciones de memoria. Y, por supuesto, nada de esto se ha hecho antes, al menos no a este nivel de escala y complejidad. En un momento dado, el AGC podría tener que coordinar varias tareas a la vez: tomar lecturas del radar, calcular la trayectoria, realizar la corrección de errores en los giroscopios, determinar qué propulsores deberían dispararse, así como transmitir datos a las estaciones terrestres de la NASA y recibir nuevas entradas de los astronautas .

Hal Laning ideó lo que llamó un programa ejecutivo, que asignaba diferentes prioridades a las tareas y permitía que las tareas de alta prioridad se hicieran antes que las de baja prioridad. La computadora podría asignar memoria entre diferentes tareas y realizar un seguimiento de dónde se había interrumpido una tarea.
El equipo de software del Laboratorio comenzó a diseñar intencionalmente el software con una capacidad de programación prioritaria que podría identificar los comandos más importantes y permitir que estos se ejecuten sin interrupción de comandos menos importantes.
Sin embargo, para el otoño de 1965, se hizo evidente para la NASA que la computadora Apollo estaba en serios problemas, ya que el desarrollo de los programas estaba significativamente retrasado. El hecho de que una cantidad relativamente desconocida llamada 'software' pudiera retrasar todo el programa Apollo no fue bien recibido por la NASA.
Siguiente: Parte 3, descifrándolo todo.